Драйвера для CAN интерфейсов
HMS поддерживает драйвера для интерфейсов, обеспечивая работу в Windows, Linux, а так же в операционных систем реального времени.
VCI (Windows)
Мощное программное обеспечение драйверов с общим программным интерфейсом для всех CAN интерфейсов.
В комплект поставки каждого CAN интерфейса входит универсальный драйвер «Virtual Communication Interface» (VCI) для Windows. Этот мощный пакет драйверов поддерживает все CAN интерфейсы, независимо от их интерфейса ПК, с единым программным интерфейсом (API). Это означает, что приложения на базе VCI-API могут использоваться со всеми CAN интерфейсами без модификации прикладной программы.
С VCI, HMS представляет третье поколение своего проверенного драйвера CAN, основанного на успешной концепции VCI. Драйвер обеспечивает единый программный интерфейс, не зависящий от технологии интерфейса ПК, и, таким образом, позволяет использовать все CAN интерфейсы без адаптации прикладного программного обеспечения.
VCI спроектирован как сервер системы и позволяет одновременный доступ нескольких приложений к одному или нескольким CAN контроллерам одного или нескольких CAN интерфейсов. Перемещение всех важных функций в ядро оптимизирует совместимость драйвера VCI c режимом реального времени.

Связь с CAN интерфейсом осуществляется по каналам передачи сообщений. Канал сообщений состоит из одного передающего и одного принимающего FIFO. Каналы сообщений могут создаваться исключительно или совместно. Если каналы сообщений создаются совместно для определенного CAN контроллера, то данные этого CAN контроллера распределяются поровну между различными каналами сообщений. Приемный FIFO канала сообщений поддерживает методы доступа «с контролем события» и «опрос», при которых для запуска события может быть определен уровень заполнения FIFO. Кроме того, для каждого CAN контроллера может быть выполнена специальная фильтрация сообщений. CAN сообщения считываются из приемного FIFO со статусом и меткой времени приема.
В дополнение к стандартному методу передачи, интеллектуальные CAN интерфейсы (CAN интерфейсы с собственным микроконтроллером) поддерживают расширенные функции передачи, такие как передача сообщений с временной задержкой, которая управляет потоком сообщений через время блокировки передачи, или циклическая передача самим CAN интерфейсом, с помощью которой может быть сформирована высокая загрузка шины и точное время цикла сообщений. Также доступны инкрементальные функции, которые могут изменять передаваемые данные.
VCI поддерживает систему оповещения «plug & play», с помощью которой вставка и удаление CAN интерфейсов автоматически обнаруживаются и обрабатываются. Это позволяет удалять устройства во время работы приложения VCI.
Интерфейсы приложений VCI
- C-API
- .NET-API
- JAVA-API
- LabView-API
- DasyLab (содержит драйвера для CAN интерфейсов)
- LabWindows
Поддержка LabView
Использование CAN интерфейса в сочетании с тестовой и программной системой LabView от National Instruments поддерживается библиотекой VI.
Дополнительные функции CAN драйвера VCI
- Удобная установка CAN интерфейса через диспетчер устройств Windows
- Подготовленный диалог выбора установленных CAN интерфейсов упрощает интеграцию в пользовательское приложение
- Функции управления для запуска и тестирования CAN интерфейса
- Автоматическая загрузка встроенного программного обеспечения для активных CAN интерфейсов непосредственно из драйвера позволяет легко обновлять встроенное программное обеспечение
- Стандартный (11-битный идентификатор, CAN 2.0A) и расширенный протокол (29-битный идентификатор, CAN 2.0B)
- Обнаружение и отображение кадров ошибок на шине
- Измерение и отображение загрузки шины (только для активных CAN интерфейсов)
- Прием собственно передаваемых сообщений (самоприем)
- Возможная работа в режиме «Listen only»
- Циклическая передача CAN сообщений (только для активных CAN интерфейсов)
Простая установка CAN интерфейсов
CAN интерфейсы устанавливаются в соответствии со стандартом Windows. Во время установки данные установленных CAN интерфейсов заносятся в реестр.
Доступные версии
Драйвер VCI версии 3 доступен для Windows 2000 / XP / Vista / Windows7 (32/64) / Windows8 (32/64). Более старые операционные системы Windows будут поддерживаться драйвером VCI версии 2.
Также возможно, что CAN карты и CAN модули других производителей будут поддерживаться драйвером VCI CAN. Пожалуйста, спросите нас, заинтересованы ли Вы в этой возможности.
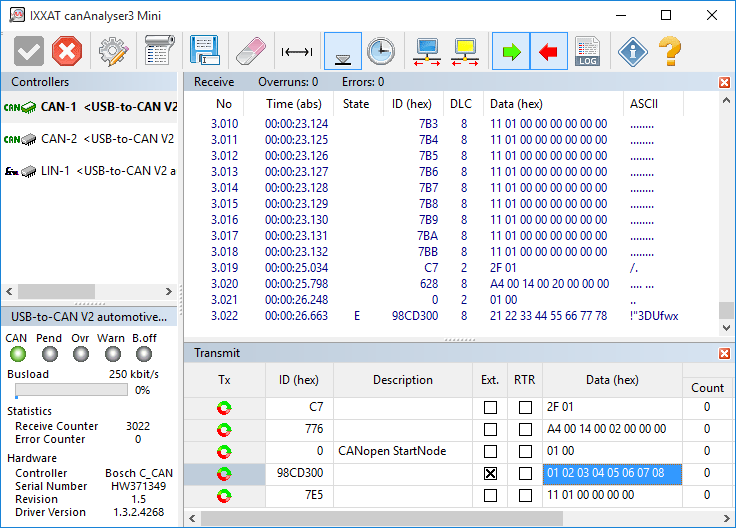
Бесплатный CAN монитор «canAnalyser mini»
Для простоты тестирования и запуска CAN интерфейсов с помощью VCI, устанавливается бесплатный CAN монитор (canAnalyser mini). Этот монитор может использоваться для отображения CAN сообщений с меткой времени, идентификаторами сообщений и данными. Функция протоколирования позволяет записывать полученные данные непосредственно на жесткий диск. CAN сообщения передаются через список, в который вводятся CAN сообщения. Установленные интерфейсы отображаются с имеющимися CAN контроллерами, текущей загрузкой шины и состоянием контроллера.