CANopen Master API
Программный пакет для разработки CANopen сервисных и тестовых приложений под Windows
CANopen Master API — это программный пакет, предназначенный для быстрой разработки приложений CANopen Master на ПК под управлением ОС Windows.
FAQ
Программное обеспечение и драйвера
Q: Как я могу отправлять необработанные CAN сообщения, используя CANopen Master API?
Существующие функции PDO могут использоваться для передачи и приема необработанных сообщений CAN Layer 2, когда параметр Node-ID установлен на 0. Эти 12+12 PDO, которые не назначены на определенный узел CANopen, также называются сетевыми PDO.
Обратите внимание, что некоторые CAN ID зарезервированы для приема сервисами CANopen (например, 80h..FFh) и поэтому не могут использоваться с Network RPDO, в противном случае возвращается код ошибки COP_k_CAL_ERROR.
COP_CreatePDO() // Define CAN-ID and Data length to transmit CAN data
COP_WritePDO() // Transmit CAN data
COP_CreatePDO() // Define CAN-ID and Data length to receive CAN data
COP_ReadPDO() // Receive CAN data
COP_WritePDO() // Transmit CAN data
COP_CreatePDO() // Define CAN-ID and Data length to receive CAN data
COP_ReadPDO() // Receive CAN data
Q: Возможно ли получить доступ к CAN интерфейсу с приложением «CANopen Master API» и приложением «VCI» (например: Minimon) одновременно?
Нет, потому что «CANopen Master API» и «VCI» загружают различное встроенное программное обеспечение в CAN интерфейс.
Q: CANopen Master API V2.18 не работает с VCI V2. Почему?
При использовании устаревших версий CANopen Master API <= 2.18 (cop21un6.dll (0,2,1,8)) устанавливаются устаревшие драйверы, несовместимые с VCI V2.
Более новые версии CANopen Master API >= 2,21 (Cop221.exe, cop22un6.dll (2,2,1,2)) основаны на VCI V2 и больше не устанавливают дополнительные драйвера. Поэтому VCI V2 должен быть установлен ранее.
Пожалуйста, используйте CANopen Master API V2.18 без установленного VCI или более новый CANopen Master API (версии >=2.21) с VCI версии 2.14.
Таблица совместимости CANopen Master API V2.21:
| CAN интерфейс | VCI V2.14 WIN 98 | VCI V2.14 WIN NT SP5 | VCI V2.14 WIN2000 SP1 / WIN XP |
|---|---|---|---|
| iPC-I 320(ISA/104/PCI) | ✔ | ✔ | ✔ |
| iPC-I 165(ISA/PCI) | ✔ | ✔ | ✔ |
| tinCAN2 | ✔ | ✔ | |
| tinCAN3 | ✔ | ✔ | ✔ |
| tinCAN4 | ✔ | ✔ | ✔ |
Таблица совместимости CANopen Master API V2.18:
| CAN интерфейс | VCI V2.14 WIN 98 | VCI V2.14 WIN NT SP5 |
|---|---|---|
| iPC-I 320(ISA/104/PCI) | ✔ | ✔ |
| iPC-I 165(ISA/PCI) | ✔ | ✔ |
| tinCAN2 | ✔ | ✔ |
| tinCAN3 | ||
| tinCAN4 |
Q: Что происходит при вызове COP_CreatePDO()?
Управление PDO реализовано в виде статического массива во встроенном программном обеспечении. Для каждого узла зарезервированы 16+16 PDO, независимо от того, используются PDO или нет. Ограничения устанавливаются доступной оперативной памятью на соответствующем типе платы.
- Чтобы справиться с этими ограничениями, регистрируйте только активные PDO в CANopen Master API, вызывая функцию COP_CreatePDO().
- Кроме того, для большей ясности целесообразно использовать номера PDO в том порядке, в котором они присутствуют на устройстве, т.е. CANopen Master API PDO#1 = 1400/1800 устройства и т.д.
При программировании CANopen Master API мы адаптируемся к существующим физическим PDO подчиненных устройств CANopen:
- Создайте соответствующие/совпадающие CANopen Master API PDO для PDO ведомого устройства.
При создании этих PDO устанавливаются внутренние записи и соединения CANopen Master API, но конфигурация PDO ведомого устройства не изменяется. Чтобы изменить PDO конфигурацию ведомого:
- Используйте соответствующие функции SDO CANopen Master API для перезаписи записей параметров связи и отображения PDO ведомых устройств в словаре объектов.
- Создайте соответствующий CANopen Master API PDO, зеркально отображающий изменения ведомого.
Q: Какая информация важна для обработки запроса на поддержку CANopen Master API?
- Какая версия API CANopen Master используется?
(см. «Пуск | Панель управления | Программное обеспечение | IXXAT CANopen Master API версия» или номер версии XatCOP50.dll, cop40un6.dll, cop22un6.dll, cop21un6.dll из директории Windows System32). - Возможно ли воспроизвести проблему с примером программирования из директории установки CANopen Master API?
- Пожалуйста, используйте отладочную версию XatCop50.dll, cop40un6.dll из установочной директории CANopen Master API.
(например: C:| Программы | IXXAT| CANopen Master API 5.1| bin| debug| log| XatCOP50.dll) и вышлите нам созданный файл протокола XatCOP50.log, COPMST32.log.
Обратите внимание:
В директории «system32» Windows также есть копия XatCOP50.dll (release build), которая может быть использована приложением. Пожалуйста, переименуйте этот экземпляр для создания лог-файла. - Какая версия VCI установлена?
(см. «Пуск | Панель управления | Программное обеспечение | IXXAT VCI версия» или номер версии vcinpl.dll или vci11un6.dll из каталога Windows System32). - Какой CAN интерфейс используется?
(Пожалуйста, пришлите нам скриншот менеджера устройств). - Правильно ли работает CAN интерфейс с Minimon?
- Какая операционная система используется?
Общие вопросы
Q: Назначение контактов CAN
D‑SUB 9 (согласно CiA DS 102)

Вилка
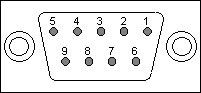
Розетка
| № контакта | Сигнал | Описание |
|---|---|---|
| 1 | — | Зарезервировано |
| 2 | CAN_L | Сигнальная линия CAN (доминантный низкий) |
| 3 | CAN_GND | «Земля» CAN |
| 4 | — | Зарезервировано |
| 5 | CAN_SHLD | «Экран» CAN (опционально) |
| 6 | GND | «Земля» CAN (опционально) |
| 7 | CAN_H | Сигнальная линия CAN (доминантный высокий) |
| 8 | — | Зарезервировано |
| 9 | CAN_V+ | Внешнее напряжение питания Vcc (опционально) |
RJ45 (согласно CiA DRP 303-1)
| № контакта | Сигнал | Описание |
|---|---|---|
| 1 | CAN_H | Сигнальная линия CAN (доминантный высокий) |
| 2 | CAN_L | Сигнальная линия CAN (доминантный низкий) |
| 3 | CAN_GND | «Земля» / 0 В / V- |
| 4 | — | Зарезервировано |
| 5 | — | Зарезервировано |
| 6 | (CAN_SHLD) | «Экран» CAN (опционально) |
| 7 | CAN_GND | «Земля» / 0 В / V- |
| 8 | (CAN_V+) | Внешнее напряжение питания Vcc (опционально) |
Вилка для платы/Розетка
| № контакта | Сигнал | Описание |
|---|---|---|
| 1 | — | Зарезервировано |
| 2 | GND | «Земля» CAN (опционально) |
| 3 | CAN_L | Сигнальная линия CAN (доминантный низкий) |
| 4 | CAN_H | Сигнальная линия CAN (доминантный высокий) |
| 5 | CAN_GND | «Земля» CAN |
| 6 | — | Зарезервировано |
| 7 | — | Зарезервировано |
| 8 | (CAN_V+) | Внешнее напряжение питания Vcc (опционально) |
| 9 | CAN_SHLD | «Экран» CAN (опционально) |
| 10 | — | Не подключен |
Коды заказа / Исполнения
| Код заказа | Исполнение |
|---|---|
| 1.12.0132.00000 | CANopen Master API |